version 01
Last modified: Thu Dec 26 13:44:18 JST 2002
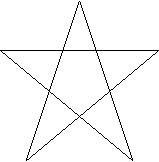
[必須] ロボットに鉛筆またはペンを取り付け、 A3 用紙の上に ★型を描かせなさい (練習問題 3.3)。
#define MOVE_TIME 200
task main()
{
OnFwd(OUT_A+OUT_C); // AとCのモータを正回転
Wait(200); // 2秒間前進
repeat(4){
OnFwd(OUT_A);
OnRev(OUT_C);
Wait(MOVE_TIME); // 方向転換
OnFwd(OUT_A+OUT_C);
Wait(200); // 2秒間前進
}
Float(OUT_A+OUT_C); // Off より滑らかに止まる
}
工夫した点:星型のズレを減らすために、ペンを中央付近に取り付けた。
[必須] 机の上で動き回るロボットを作成しなさい。 ただし方向変換は机の端に来たときに行うこと (練習問題 4.2)。
task main()
{
SetSensor(SENSOR_1,SENSOR_TOUCH); // センサー端子1に接続されたセンサーが
// タッチセンサーであると宣言
while (true)
{
OnFwd(OUT_A+OUT_C) ; // 前進
if (SENSOR_1 == 0 ) //タッチセンサーが押されたら、
{
OnRev(OUT_A+OUT_C) ;
Wait(50); // 0.5 秒間バックする
OnFwd(OUT_A) ;
Wait(150); // 1.5 秒間方向転換する
}
}
}
工夫した点:タッチセンサーの位置を、前方に少し距離をおいて付けることで、机から落ちにくくした。
[必須] 前向きに光センサーを取り付けたロボットを作成し、 そのロボットがもっとも明るい方向 (例えば照らした懐中電灯の方向) を向くようにしなさい。 さらにそのロボットが、 懐中電灯の光を追いかけて進むようにプログラムを改良しなさい (練習問題 4.5.1, 4.5.2)
#define RUN_TIME 50 // トレースする時間(単位 1/10 秒)
int lightmax;
int timemax;
task main ()
{
SetSensor(SENSOR_1, SENSOR_LIGHT);
while (true)
{
lightmax = 0;
timemax = 0;
ClearTimer(0); // Timer(0) をリセット
while ( Timer(0) <= RUN_TIME )
{
OnFwd(OUT_A);
OnRev(OUT_C);
if (SENSOR_1 >= lightmax)
{
lightmax = SENSOR_1 ;
ClearTimer(1); // Timer(1) をリセット
}
}
timemax = Timer(1);
ClearTimer(0); // Timer(0) をリセット
OnRev( OUT_A );
OnFwd( OUT_C );
until( Timer(0) >= timemax );
OnFwd(OUT_A + OUT_C);
Wait(50);
}
}
工夫した点:
[必須] 明るいところでは、長調で、暗いところでは短調で、
曲を演奏するプログラムを作成しなさい (曲は何でもよい) (練習問題 5.2)。
工夫した点:
[自由課題] 黒い線に沿って速く走るロボットを作成せよ
(例題の改良)。
工夫した点:
{kind=link}