メンバー:☆遠藤雅志、加藤友里、宮本秀俊、荒井隆治
version ??
Last modified: Thu Dec 26 13:44:18 JST 2002
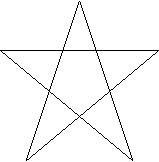
[必須] ロボットに鉛筆またはペンを取り付け、 A3 用紙の上に ★型を描かせなさい (練習問題 3.3)。
task main()
{
repeat(2){
OnFwd(OUT_A+OUT_C);
Wait(200);
OnFwd(OUT_A);
OnRev(OUT_C);
Wait(59);
OnRev(OUT_A+OUT_C);
Wait(200);
OnFwd(OUT_A);
OnRev(OUT_C);
Wait(59);
}
OnFwd(OUT_A+OUT_C);
Wait(200);
Float(OUT_A+OUT_C);
}
工夫した点:
鉛筆をロボットの中心に固定したことで安定感が増し、
線が曲がりにくくなった。
[必須] 机の上で動き回るロボットを作成しなさい。 ただし方向変換は机の端に来たときに行うこと (練習問題 4.2)。
task main()
{
SetSensor(SENSOR_1,SENSOR_TOUCH);
while(true)
{
OnFwd(OUT_A+OUT_C);
until (SENSOR_1 == 1);
Off(OUT_A+OUT_C);
Wait(50);
OnRev(OUT_A+OUT_C);
if(SENSOR_1 == 1)
{
OnFwd(OUT_A+OUT_C);
}
OnFwd(OUT_C);
OnRev(OUT_A);
Wait(150);
}
}
工夫した点:
前輪を上下に動くようにして、その上にセンサーを置いた部分
[必須] 前向きに光センサーを取り付けたロボットを作成し、 そのロボットがもっとも明るい方向 (例えば照らした懐中電灯の方向) を向くようにしなさい。 さらにそのロボットが、 懐中電灯の光を追いかけて進むようにプログラムを改良しなさい (練習問題 4.5.1, 4.5.2)
int light_number, light_number1, light_number2, max_light,max_light1, max_light2;
int max_time, max_time1, max_time2, number, number1, number2, roll_number;
int count,counting, quata;
task main()
{
SetSensor(SENSOR_1, SENSOR_LIGHT);
max_light = 0;
max_time = 0;
light_number = 0;
roll_number = 0;
count = 0;
quata = 0;
for(number = 1; number <= 188; number++)
{
OnFwd(OUT_A);
OnRev(OUT_C);
Wait(1);
light_number = SENSOR_1;
if(light_number > max_light){
max_light = light_number;
max_time = number;
}
}
roll_number = 218-max_time;
OnFwd(OUT_C);
OnRev(OUT_A);
Wait(roll_number);
Off(OUT_A+OUT_C);
while(1)
{
light_number1 = 0;
light_number2 = 0;
max_light1 = 0;
max_light2 = 0;
count++;
counting = 10;
quata = 15;
if(count%4 == 0){
counting = 30;
quata = 30;
}
for(number1=1; number1<=counting; number1++)
{
OnFwd(OUT_A);
OnRev(OUT_C);
Wait(1);
light_number1 = SENSOR_1;
if(light_number1 > max_light1){
max_light1 = light_number1;
max_time1 = number1;
}
}
OnFwd(OUT_C);
OnRev(OUT_A);
Wait(counting);
for(number2=1; number2<=counting ; number2++)
{
OnFwd(OUT_C);
OnRev(OUT_A);
Wait(1);
light_number2 = SENSOR__1;
if(light_number2 > max_light2){
max_light2 = light_number2;
max_time2 = number2;
}
(OUT_A);
}
Wait(number2);
OnFwd(OUT_A+OUTC);
OnRev(OUT_C)
Wait(counting);
if(max_light1 > max_light2){
max_light2 = light_number2;
max_time2 = number2;
}
(OUT_A);
}
Wait(number2);
OnFwd(OUT_A+OUT_C);
Wait(quata);}
if(max_light1 == max_light2){
OnFwd(OUT_A+OUT_C);
Wait(quata);}
}
}
工夫した点:
[必須] 明るいところでは、長調で、暗いところでは短調で、 曲を演奏するプログラムを作成しなさい (曲は何でもよい) (練習問題 5.2)。
工夫した点:
[自由課題] 黒い線に沿って速く走るロボットを作成せよ (例題の改良)。
#define THRESHOLD 40
task main()
{
SetSensor(SENSOR_1, SENSOR_LIGHT);
/* ClearTimer(0);*/
while(1) {
if(SENSOR_1 > THRESHOLD) {
OnFwd(OUT_A);
Off(OUT_C);
} else {
Off(OUT_A);
OnFwd(OUT_C);
}
}
}
工夫した点:
ライトセンサーの位置を機体の中心にした部分
{kind=link}