
図のように直径20cmの円の敷地内に350mlと500mlのアルミ缶を使って ビル(あるいは塔、ピラミッド)を建設する。
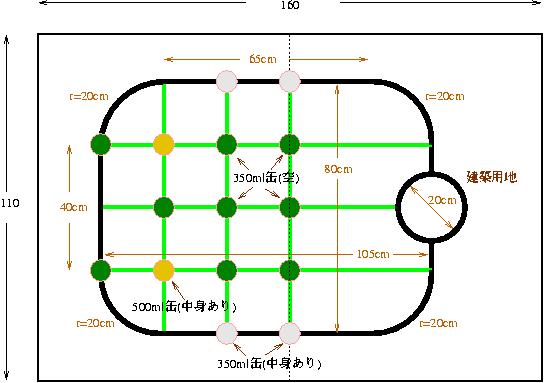
ラインの太さはすべて25mm。 建築用地の境界線は半径10cmと半径12.5cmの同心円の間を黒く塗った円である。 その他の記載されている寸法は各ラインのセンターを基準としたものである。
なお、上の 160cm×110cm のフィールドの外側には
それに接するようにRISの青い箱をすき間無く並べる。
最後の缶を積み上げるまでの時間を T とした時、
得点 = ( 制限時間 / T )× (積み上げた缶の個数)
で計算する。ただし、10点を越える場合には 10点とし、 小数点以下は四捨五入。 途中で放棄した場合および制限時間いっぱいまで作業を 行った場合には、積み上げた缶の個数がそのままタイム得点となる。
以下の動作の精度・スピード・確実性などを含めた技術的な工夫について 全てのグループ(自分自身も含めて)が採点する。 その上で最高得点と最低得点を除外して残り10個の得点の平均を計算する。
得点の目安:
・ 缶を探す動作 (3点)
・ 缶を運搬する動作 (3点)
・ 缶を適切な位置に積み上げる動作 (6点)
・ 2台の RCX の協調 (4点)
・ その他 (4点)
自立型のロボットとしての形や動作の美しさ(5点) および完成した建築物の美しさや斬新さなど(5点)の芸術性を 各グループの基準で評価する(計10点)。 その上で最高得点と最低得点を除外して残り10個の得点の平均を計算する。